![]()
![]()
![]()
Neukonstruktion eines Hubschraubers mit drei Rotoren und energiesparender Gashülle
2
Die Formgebung und wirkende Kräfte
2.1.1
Die Schwerpunktverlagerung
3.1
Verwendete Werkstoffe und Verbindungstechniken
3.2
Motorisierung und Leistung
3.3
Übersetzung zur Effektivitätssteigerung
3.4
Schwenkbare Motorhalterungen zur Drehmoment-Beeinflussung
3.5
Luftstromumlenkung zur Leistungssteuerung
3.7
Gesamtdarstellung des Untergestells
4.3
Vorgehensweise bei der Konstruktion
4.4
Hubkraft mit Helium und Wasserstoff
4.5
Befestigung am Untergestell und Sicherung der Ansaugschächte
5.1
Einbau der Funkfernsteueranlage
5.1.1
Kanalbelegung an der Funkfernsteueranlage
6.4
Die Schnittstellen und Protokolle
6.5
Das Notprogramm (Notsystem)
7.1
Probeflüge mit Bodensicherung
Diese Arbeit beschreibt die Neukonstruktion eines Helikopters. Es wird dabei auf den Erfahrungen aus dem "Jugend forscht"-Projekt "Konstruktion eines sich selbst stabilisierenden Hubschrauber mit drei Hauptrotoren" aufgebaut, welches 1999 eingereicht worden ist.
Die Idee zu einen "hubschrauberähnlichen" Fluggerät wurde schon von Leonardo da Vinci um 1500 skizziert, aber erst am Anfang dieses Jahrhunderts konnte diese Art von Fliegen realisiert werden. Es wurden verschiedene Konstruktionen entwickelt, wie z.B. das bekannteste der Drehflügelflugzeuge, der Helikopter. Er besitzt einen Hauptrotor und einen Ausgleichsrotor. Der Tandemhubschrauber besitzt an Stelle des Ausgleichsrotors einen zweiten gegenläufigen Hauptrotor. Es wurden davor auch schon Kombinationen von Flugzeug und Helikopter entwickelt, die so genannten Flugschrauber. Alle Hubschrauber haben den Nachteil, dass sie verhältnismäßig viel Energie verbrauchen.
Eine andere interessante
Entwicklung sind die Zeppeline, die aus dem Freiballon entwickelt wurden. "Das
erste Luftschiff im weiteren Sinne stammt von dem Franzosen Henri Giffard. 1852
versuchte er einen zigarrenförmigen, unstarren 44 Meter langen Freiballon mit
einem Schraubenpropeller und einer 2,2Kw-Dampfmaschiene anzutreiben. Mit einer
Geschwindigkeit von etwa zehn Km/h flog es über Paris" [1].
In unserem Projekt ist eine Kombination aus dem Helikopter und dem Blimp[1] konstruiert worden. Die übliche Form des Helikopters musste neu überdacht werden, um Platz für die Gashülle zu schaffen. Die Deltaform stellte sich als optimal heraus. Mit drei Hauptrotoren konnte auf die komplizierte Mechanik zum zyklischen Verstellen der Rotorblätter verzichtet werden. Der uFO (universeller Forschungs- Observator) ist durch Zweitakt-Verbrennungsmotoren ausreichend motorisiert, so dass er auch ohne Gashülle flugtauglich ist. Die Gashülle ist nicht wie bei einem Blimp so dimensioniert, dass sie ohne Motorenhilfe abheben kann. Dadurch würde die Beweglichkeit zu sehr reduziert.
Die Idee zu diesem Projekt entstand aus der Problematik mit dem Vorgängerflugobjekt. Die Zielsetzung dabei war, ein selbst fliegendes Objekt zu schaffen. Die Motorisierung mit 9,6V Elektromotoren war nicht ausreichend genug, um es längere Zeit in der Luft zu halten. Die fehlende Auftriebsenergie durch eine Gashülle zu gewinnen, verbesserte nicht das alte, sondern schuf ein völlig neues Projekt mit neuer Aufgabenstellung. Die Automatisierung ist nur noch als zweitrangiges Ziel anzusehen. Im Vordergrund steht jetzt der Beweis der Flugtauglichkeit.
Insgesamt ist diese Version des uFO natürlich nicht als ausgereiftes Fluggerät zu betrachten, sondern vielmehr als Versuchsobjekt, an dem automatisierte Subsysteme getestet und deren Zusammenspiel beobachtet werden können.
Erfolgreiche Testflüge zeigten jedoch, dass mit Geschick des Piloten auch das uFO von Hand zu fliegen ist.
An dieser Stelle möchten wir der Firma Schering AG für die Leihgabe des Helium danken, sowie der Firma Hella KG, die uns in der Entwicklung der Steuerelektronik hilfreich zur Seite stand.
|
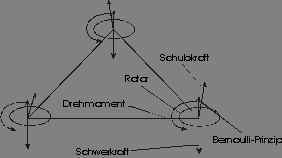
Abbildung
1,
wirkende Kräfte |
Konventionelle Hubschrauber bestehen aus einem horizontalen Hauptrotor und einem vertikalen Heckrotor, der der Eigenrotation des Hubschraubers entgegenwirkt. Um den Hubschrauber in eine Richtung zu lenken, muss entweder der gesamte Hauptrotor gekippt werden, oder die Rotorblätter werden durch eine Taumelscheibe in jedem Moment der Rotationsbewegung anders gestellt. Diese beiden Möglichkeiten erfordern eine komplexe mechanische Vorrichtung.
Bei
dem uFO sind die Motoren in Form eines gleichseitigen Dreiecks angeordnet. Das
Dreieck ist im dreidimensionalen Raum immer statisch bestimmt. Das bedeutet,
es gibt immer nur eine Möglichkeit, wie die Kräfte an den Eckpunkten verteilt
sein müssen, um eine bestimmte Lage im Raum zu erreichen. Dieses vereinfacht
die Steuerung durch Computer oder Menschen. Der uFO wird durch die Schwerkraft
zum Boden gezogen. Dagegen wirkt erstens die Schubkraft, erzeugt durch die verdrängte
Luft. Zweitens durch den Unterdruck oberhalb der Luftschraube und dem Überdruck
unterhalb, erzeugt durch das Bernoulli-Prinzip[2].
Auf das Drehmoment wird zu einem späteren Zeitpunkt eingegangen.
Die Hülle kann nicht wie
eine normale Blimphülle aufgebaut
werden. Die übliche Zigarrenform hat in Fahrtrichtung einen geringen Luftwiderstand,
aber durch die längliche Bauform auch einen großen Wendekreis. Um die Beweglichkeit
des uFO nicht einzuschränken, ist die Hülle als flache Scheibe konstruiert,
in der drei Durchgangslöcher für die Luftschrauben und die Motoren
vorgesehen sind. Diese Formgebung ermöglicht es, die Hülle auf dem Grundgestell
zu befestigen.
Der uFO wird um so stabiler,
je weiter der Schwerpunkt nach unten verlegt wird. Aus diesem Grund wird die
Gashülle über dem Gestell angebracht und nicht unter dem Gestell. Die zweite
Variante hätte den Vorteil, dass die Hülle nicht durch die rotierenden Propeller
gefährdet würde. Im ungünstigsten Fall würde sich der uFO aber um 180° wenden
und ein Absturz wäre nicht zu vermeiden.
Im uFO sind sowohl Hightech-Materialien
wie CFK (Carbonfaserverstärkter Kunststoff), Kevlar
und Glasfaser verarbeitet, aber auch natürliches Balsaholz. Bei der Wahl
der Werkstoffe ist immer ein Kompromiss zwischen Stabilität und Gewicht zu finden.
Bei der Verwendung unterschiedlicher Materialien entsteht das Problem, dass für jede Kombination eine optimale Verbindungstechnik gefunden werden muss. Die Holzelemente sind wie üblich geleimt. Bei der Verbindung von Holz mit CFK-Rohr kann nur mühsam geklebt werden. Die Verwendung von Schrauben wird durch die Empfindlichkeit des CFK-Rohrs gegen solche Art von Druck nicht empfohlen. In diesem Fall ist mit festen Draht das Rohr an das Holz "genäht". Mit zusätzlicher Fixierung durch Heißkleber erhält man eine optimale Verbindung.
Eine weitere Möglichkeit ist das Versplinten in Verbindung mit der "Nähtechnik", dadurch kann eine Verdrehung gegeneinander verhindert werden.
Die
verwendeten Weichhölzer sind mit Kunstharz bestrichen. Dies gibt dem Holz eine
höhere Stabilität, die Oberfläche wird gegen Deformation und Schmutz geschützt.
Der Flugroboter V1 aus dem
Vorgängerprojekt hatte erhebliche Probleme mit der Energieversorgung. Dieser
war mit drei 9,6V Gleichstromelektromotoren ausgestattet. Auf Grund des schlechten
Wirkungsgrads und des dazu relativ hohen Eigengewichts der Motoren lag die Flugzeit
unter 1 Minute. In dieser Zeit erhitzten sich die Motoren und die Leistung nahm
soweit ab, dass ein Flug nicht mehr möglich war. Im uFO wurden aus diesen Gründen
Zweitakt-Verbrennungsmotoren eingesetzt.
|
Hersteller |
O.S.Engines Osaka / Japan |
|
Typ |
Os
Max 25 |
|
Hubraum cm3 |
4,07 |
|
Leistung |
0,44 kW bei 15000 U/min |
|
Drehzahlbereich U/min ca |
2500- 16000 |
|
Gewicht |
185g |
|
Maße |
66,5 x 45 x 74,5 |
Der Wirkungsgrad einer Luftschraube steigt mit ihrem Durchmesser. Eine langsam drehende Luftschraube hat einen höheren Wirkungsgrad als eine schnelldrehende kleine Luftschraube.
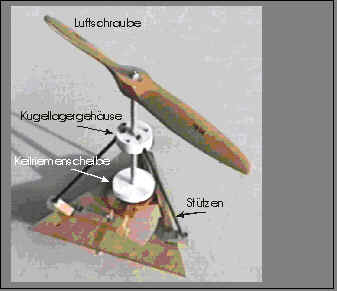 In Abbildung
2 ist der Prototyp zu sehen. Die Luftschraube ist an einem 8mm Aluminiumrohr
befestigt, dass zweifach kugelgelagert ist. Durch die Öffnung in
der dreieckigen Sperrholzpatte
kann der Motor über den Keilriemen und die Keilriemenscheibe die Kraft auf die
Luftschraube übertragen.
In Abbildung
2 ist der Prototyp zu sehen. Die Luftschraube ist an einem 8mm Aluminiumrohr
befestigt, dass zweifach kugelgelagert ist. Durch die Öffnung in
der dreieckigen Sperrholzpatte
kann der Motor über den Keilriemen und die Keilriemenscheibe die Kraft auf die
Luftschraube übertragen.
Das Problem ergab sich bei dem Versuch den Verbrennungsmotor anzuwerfen. Bei dem Drehen der Luftschraube drehte der Keilriemen durch. Das Einbauen des Motors mit der Nabe nach unten zeigend ist nicht möglich, weil es keine linksdrehenden Luftschrauben in dieser Größe gibt.
Eine
Zahnradübersetz ung
dagegen wäre zu schwer. Diese würde die den gesteigerten Wirkungsgrad wettgemacht.
ung
dagegen wäre zu schwer. Diese würde die den gesteigerten Wirkungsgrad wettgemacht.
Die im Modell verwendeten
Motoren sind ausschließlich linksdrehend. Dadurch wird ein Drehmoment erzeugt,
das das gesamte uFO in eine Rotation versetzen würde. Bei herkömmlichen Helikoptern
wird eine solche Eigenrotation durch den Heckrotor unterdrückt. Im uFO werden
die Motoren wie bei Propellerflugzeugen in eine leichte Schräglage gestellt.
Durch die variable Aufhängung (Abb. 3) können verschiedene Positionen getestet
werden.
Es hat sich schon bei den ersten Testflügen herausgestellt, dass selbst nur ein Motor über die Funkfernsteuerungsanlage nicht in einer Höhe zu halten ist. Das liegt daran, dass der Motor träge reagiert und sich nicht genau genug regeln lässt.
Dieses Problem ist mit Steuerungsklappen gelöst. Diese bestehen aus zwei Klappen, die über Zahnräder verbunden sind. Durch Betätigen der ersten Klappe wird auch die zweite Klappe in die entgegengesetzte Richtung im gleichen Winkel verstellt. Der durch die Propeller erzeugte Luftstrom kann dadurch seitlich abgelenkt werden und reduziert so den Auftrieb. Der Motor ist so eingestellt, dass er seine Ecke immer nach oben zieht, durch die Klappen kann der Auftrieb genau reguliert werden.
Diese Steuerung reagiert
sofort und ist sehr fein einzustellen. Es ist so auch einer ungeübten Person
im Experiment gelungen, einen Motor in einer bestimmten Höhe zu halten, während
die Gegenseite fixiert war.
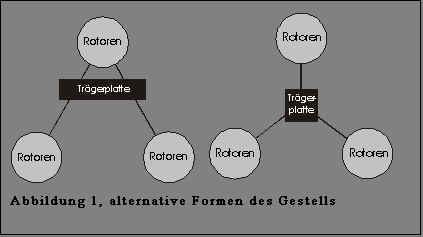 Alternative
Bauformen
Alternative
Bauformen
Alternativ zu der gewählten
Bauform (siehe 2.7) gibt es die
Möglichkeit, eine Seite einzusparen oder mit Auslegern zu arbeiten (Abb. 4).
Diese Konstruktionsformen erfordern aber eine höhere Stabilität des tragenden
Materials, was wiederum mit Gewichtszunahme verbunden ist. Die verwendete Deltaform mit drei Seitenstäben unterdrückt
die Aufschwingung durch Vibrationen. Freie Ausleger können nicht verspannt werden
und schwingen sehr leicht auf.
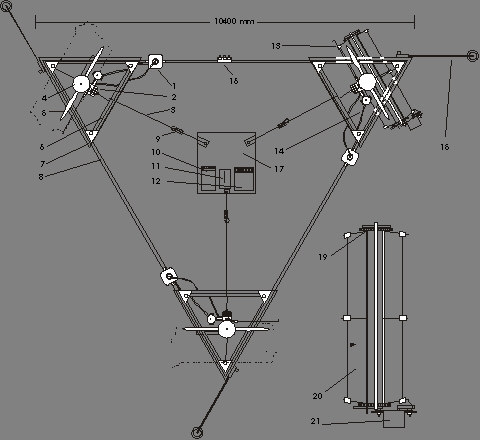
|
1 Tank 2 Motor 3 Spannseil 4 Spinner 5 Luftschraube 6 Motorgestell a 7 Motorgestell b 8 Carbongestell 9 Spannfeder Empfänger 11 Akkupaket 12 Zusatzempfänger 13 Vergasereinsteller 14 Druckschlauch 15 Stütze 16 Schalter für Glühkerzenspannung 17 Trägerplatte 18 Servo für Vergaser 19 Zahnräder 20 Leitklappen-Servo
|
Die Gashülle ist eine der
wesentlichen Neuerungen in diesem Projekt. Mit der Unterstützung durch den Auftrieb
des Heliums können die Motoren auf eine geringere Leistung eingestellt werden
und so Treibstoff sparen.
Das für die Hülle verwendete
Material muss leicht, reißfest und gasdicht sein. Erste Überlegungen führten
dazu, einen handelsüblichen Ballon mit einem Volumen von ca. 1m³ zu verwenden.
Dieser muss nicht aufwendig auf Dichtigkeit untersucht oder hergestellt werden.
Aber das Problem der Diffusion des Heliums durch die Latexhülle wäre so groß,
dass nach wenigen Tagen kein Helium in der Hülle mehr wäre. Zudem ist die rundliche
Form des Ballons aerodynamisch für den uFO ungünstig. Aus diesem Grund
ist eine mit Aluminium bedampfte PVC-
Folie verwendet worden. Sie ist extrem reißfest, hat ein Gewicht von
18,6g/m² und ist mit einem Preis von ca.1 bis 2 DM/m² außerordentlich günstig.
Angegeben ist sie mit einer Dicke von 12mm.
Bevor das eigentliche Modell geplant und gebaut werden kann, muss erst festgestellt
werden, wie sich das Material verarbeiten lässt. Zunächst sind die Nähte von
besondere Bedeutung. Sie müssen gasdicht sein und dem Überdruck standhalten.
Tests mit Versuchsstücken, an denen verschiedene Techniken getestet wurden,
ergaben, dass die einfache Überlappung mit anschließender Abdeckung (Abb. 5)
am geeignetsten ist.
Weiter musste der geeignete
Kleber gefunden werde. Heißkleber erwiesen sich als sehr haltbar, aber als überaus
umständlich zu handhaben. "Pattex Kraftkleber" der Firma Henkel hat sich als
der geeignete Kontaktkleber herausgestellt.
 Um Erfahrungen
im Umgang mit dem Material zu sammeln, ist zunächst ein einfacher Ballon gebaut
worden, an dem die Dichtigkeit
der Nähte und die Haltbarkeit des Materials getestet werden konnten. Nach diesem
anfänglichen Versuch wurde mit der Konstruktion eines verkleinerten Modells
der Hülle angefangen. An diesem
sollte festgestellt werden, wie weit sich die Hülle verzieht, wenn sie mit Gas
gefüllt wird. Dabei konnte festgestellt werden, dass sich die Ansaugschächte um 5- 8% zur Mitte
hin verzogen. Dieses muss bei der endgültigen Hülle bedacht werden.
Um Erfahrungen
im Umgang mit dem Material zu sammeln, ist zunächst ein einfacher Ballon gebaut
worden, an dem die Dichtigkeit
der Nähte und die Haltbarkeit des Materials getestet werden konnten. Nach diesem
anfänglichen Versuch wurde mit der Konstruktion eines verkleinerten Modells
der Hülle angefangen. An diesem
sollte festgestellt werden, wie weit sich die Hülle verzieht, wenn sie mit Gas
gefüllt wird. Dabei konnte festgestellt werden, dass sich die Ansaugschächte um 5- 8% zur Mitte
hin verzogen. Dieses muss bei der endgültigen Hülle bedacht werden.
eiten Schritt werden die Ansaugschächte ausgeschnitten und eingeklebt.
Danach folgt dasselbe bei der Oberseite.
Zum Schluss wird der Ein-
und Auslassschlauch eingeklebt und die Oberseite mit der Unterseite verbunden.
Nach Dichtigkeitstests mit eingepumpter Luft müssen Lecks gesucht und abgedichtet werden. Dabei hilft Leck



Der Auftrieb von Helium unter atmosphärischen Standardbedingungen ist mit ca. 1g pro 1 Liter Helium angegeben. Der Auftrieb von Wasserstoff liegt nur etwa 10% über dem von Helium. Aus Kostengründen ist es denkbar, das Helium mit Wasserstoff zu strecken. Ein Mischungsverhältnis von ca. acht Teilen Helium zu zwei Teilen Wasserstoff wäre an der Grenze zum Brennbaren. Aufgrund der geringen Ersparnisse wurde jedoch in diesem Projekt darauf verzichtet.
Im Experiment erreichte die Hülle I eine Zugkraft von 314g. Bei einem Eigengewicht von 216g ist sie folglich mit ca. 0,53m³ Helium gefüllt. Die Hülle I ist bei einen Testflug inoperabel beschädigt worden. Der Nachfolger Hülle II (siehe beiliegende CD-ROM) ist mit einem Durchmesser von ca. 2,52m größer dimensioniert. Ihr Gewicht kann aufgrund mangelnder geeigneter Messeinrichtungen nur geschätzt werden. Der Auftrieb beträgt 970g (+/- ca.30g). Das Volumen beträgt ca. 1,3m³ bis 1,4 m³. Das Gewicht ohne Gasfüllung beträgt ca. 350g. Aufgrund der geringen Atomgröße diffundiert[3] das Helium durch die Hülle. In unserem Fall verliert sie ca. 2-3l/h. Innerhalb von fünf Tagen hat sie die Auftriebsfähigkeit verloren.
Nachfüllen
mit Helium stellt nahezu die komplette ursprüngliche Tragkraft
wieder her. Allerdings diffundiert auch die Umgebungsluft in die Hülle.
Dadurch wird die ursprüngliche Tragkraft nicht mehr zu 100%
erreicht.
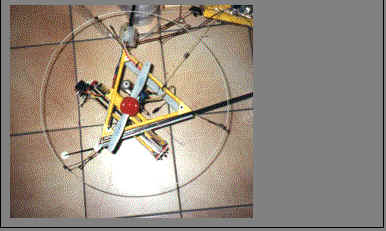
 Die
Hülle wird durch ein 4mm Nylonseil auf das Untergestell gespannt. Das Seil kann
aufgrund der Stärke die Hülle nicht beschädigen.
Die
Hülle wird durch ein 4mm Nylonseil auf das Untergestell gespannt. Das Seil kann
aufgrund der Stärke die Hülle nicht beschädigen.
Damit die Motoren nicht die Hülle in die Propeller saugen können, sind Aufspannringe aus 2mm GFK[4] in die Ansaugschächte gesetzt. Drei Verbindungsstäbe aus 1,4mm Karbonstab halten den notwendigen Abstand.
Wie hoch ist die Energieeinsparung durch die Gashülle?
uFO = 2,3 kg
Gewicht der Gashülle mit Helium = -0,97 kg
|
1.) Ohne Gashülle F = 2,3 kg ·1m·s-2 = 2,3 N |
2.) Mit Gashülle F = (2,3kg - 0,97kg) ·1m·s-2 = 1,33kg ·1m s-2
= 1,33 N |
Angenommene
Beschleunigung = 1m·s-2
Newton-Beschleunigungsgesetz:
F= m·a
F = Kraft
m = Masse des beschleunigten Körpers
a = Beschleunigung
Prozentuale Umrechnung:
2,3N = 100%
1N = 10/23%
1,33N
= 57,83%
Es
wird mit der Gashülle nur noch ca. 58% der Kraft benötigt um das Objekt zu beschleunigen.
Es folgt, dass dementsprechend auch weniger Energie benötigt wird.
■
Für die Testflüge und für
die Sicherung im Falle eines Computerausfalles ist es unbedingt erforderlich,
dass eine manuelle Steuerung möglich ist. Die Fernsteuerungsanlage besitzt drei
Kanäle für die Motoren und weitere drei für die Steuerungsklappen.
Die Kanäle der Funkfernsteueranlage sind so eingerichtet, dass es möglichst einfach zu verstehen ist, welches Steuerelement für welchen Motor bzw. Klappe zuständig ist. In Testflügen hat sich herausgestellt, dass für die Testpiloten eine spiegelverkehrte Steuerung überaus problematisch ist. So wurde die Belegung so angepasst, dass die Klappen durch die Analogsteuerelemente zur Fernsteuerungsmitte hin geöffnet und zum Rand hin geschlossen werden. Die dritte Klappe wird durch das Bewegen des Steuerelements nach oben geöffnet.
Die Motorensteuerung ist auf das "multiprop-system" [5] gelegt worden, weil diese Kanäle träge reagieren, da sie digital über einen Kanal gesendet werden.
Ganz zu Beginn unseres Projektes
ergab sich die Frage, ob eine Steuerung zur Automatisierung des Flugobjektes
sinnvoll oder sogar notwendig sei. Denn
die Problematik bei der manuellen Steuerung war einerseits die Unübersichtlichkeit
der Steuerung und die damit einhergehende Navigierunfähigkeit. So muss der Benutzer
die Einstellungen für sechs Servomotoren übernehmen, um damit die Veränderung
einzelner Einstellungen, wie z.B. der Höhe, zu erreichen. Dies erwies sich in
der Testphase als ein äußerst schwieriges Unterfangen. Schon bei der Planung
waren zwei Ideen für Navigationshilfen in Aussicht.
Dieses Prinzip sollte es
dem Benutzer erlauben, weiterhin alle sechs Servos von Hand zu steuern. Das
Navigationssystem (NavS) sollte in diesem Fall nur als Hilfe dienen. So war
es geplant, dass das NavS die Signale an die Servos solange unverändert weiterleitet,
solange keine Gefahr des Absturzes oder der Kollision besteht. Wird aber ein
solcher Fall registriert, so werden die Steuersignale für die Servomotoren so
verändert, dass der Gefahr entgangen werden kann. Man könnte sich z.B. vorstellen,
dass das Flugobjekt sich in einer gefährlichen Schieflage befindet. Nun werden
solche Signale generiert, die das Flugobjekt wieder in einen sicheren horizontalen
Flug lenken. Dennoch würde dies die Steuerung nur sicherer, jedoch nicht einfacher
gestalten. Der Benutzer müsste immer noch sechs Kanäle manuell ansteuern, wodurch
die Verständlichkeit der einzelnen Parameter immer noch nicht gegeben wäre.
Diese Methode unterscheidet
sich grundsätzlich von dem ersten Vorschlag. Der Benutzer sollte in diesem Fall
nur wenige Parameter, wie z.B. die Soll-Höhe, die Soll-Neigung und Soll-Richtung
kontrollieren. Diese Größen sind leicht zu überschauen und leicht zu verstehen.
Sie können intuitiv umgesetzt werden und erfordern kein Training, um z.B. durch
die gezielte Veränderung der sechs Servomotorpositionen eine Änderung der Höhe
zu erreichen. Das NavS verarbeitet diese Kommandos nun intern mit den Ist-Größen,
die von den Sensoren geliefert werden, und generiert die nötigen Steuersignale
für die Servomotoren. Dieses Prinzip bietet eine überschaubare Steuerung und
reduziert den Aufwand der Signalverarbeitung. So müssen
bei dieser Methode nicht sechs Input-Signale, sondern nur 3 verarbeitet
werden. Außerdem müssen nicht immer alle Daten übermittelt werden. Man kann
dem Flugobjekt nur einmal eine Soll-Höhe vorschreiben, die das NavS dann einhalten
muss. Diese Maßnahme reduziert die Datenmenge und damit die Verarbeitungsgeschwindigkeit.
Als
weitere Schwierigkeit stellte sich das Einlesen der Servosignale in eine Fernsteuerung
dar, denn dies erfordert exaktes Timing.
Das erste Problem, das sich bei der Programmierung stellte, war die Wahl eines geeigneten Algorithmus. Es musste berücksichtigt werden, dass das Flugobjekt Benzin verbraucht, und damit leichter wird, dass die Windverhältnisse sich ändern könnten, wodurch das Verhältnis Motorleistung zu Auftrieb geändert werden würde, und dass auf Grund der Trägheit die Servos nicht proportional zur Neigung angesteuert werden können , da die Rückstellkraft bzw. die Auftriebskraft auch nicht proportional zum Winkel ist. So würde sich das Flugobjekt dann in einem ewigen Schwingungsvorgang befinden.
Schon vor einigen Jahren beschäftigte man sich mit dem Bereich der künstlichen neuronalen Netzen, also mit Nachahmungen der Mechanismen in biologischen Gehirnen. Diese verarbeiten keine Kette von arithmetischen Befehlen nach dem Prinzip von Neumann[6], sondern verteilen die Berechnung über mehrere Elemente, die Neuronen. Die Daten werden dabei nicht aufgeteilt und separat von jedem Element einzeln gelöst, sondern durch das Netzwerk parallel verarbeitet. Diese Netze sind dadurch gekennzeichnet, dass sie eine hohe Assoziationsfähigkeit besitzen und unscharfe, sogar nicht bekannte Regeln erkennen und verarbeiten können. Es ist folglich nicht nötig, diesen Netzen Regeln vorzuschreiben, wie beispielsweise a=b·5. Man braucht nur anzugeben, was richtig bzw. falsch ist. Durch dieses Prinzip der "Belohnung" und "Bestrafung" sind diese Netze also in der Lage, selbständig Regelmäßigkeiten zu entdecken. Außerdem sind sie in der Lage, auf bisher unbekannte Situationen zu reagieren. Übertragen auf unser Projekt würde dies bedeuten, dass das neuronale Netz "bestraft" werden müsste, wenn sich das Flugobjekt entgegen dem Kommando geneigt hat. Also ein ideales Steuersystem für unser Projekt.
Nun benötigen solche Netze jedoch schnelle Rechner und einiges an Speicherkapazität. Außerdem ist es nicht einfach, einen geeigneten Lernalgorithmus aufzustellen. Denn leider sind noch längst nicht alle Vorgänge in den biologischen Gehirnen gelöst.
Bei Gesprächen an der Fachhochschule Dortmund wies man auf weitere Probleme bei der Anwendung von neuronalen Netzen hin. Diese können kurzeitig und sporadisch in einen chaotischen Zustand verfallen, was einen sofortigen Absturz zufolge hätte. Darüber hinaus ist schwer zu bestimmen, was diese Netze konkret gelernt haben. Diese Unsicherheiten ließen die Nützlichkeit dieser Technologie fragwürdig erscheinen.
Seit nun mehreren Jahren arbeitet man schon in vielen Bereichen mit der "Logic of fuzzy sets". Der arithmetische und logische Charakter der heutigen Computer lässt eine Verarbeitung von nicht eindeutig kategorisierbaren Signalen nicht zu. Dazu gehören auch die subjektiven Unstimmigkeiten des menschlichen Sprachgebrauchs wie z.B. warm & kalt. Es ergab sich aber die Notwendigkeit, mit solchen unklaren Begriffen zu arbeiten und diese mit den logischen Regeln für Computer umzusetzen. Diese unscharfe Logik, wie es übersetzt heißt, definiert nicht eindeutige Einordnungsgrenzen, sondern wählt dafür Übergangsbereiche.
So kann jeder Kategorie ein Wert für das Zutreffen zugeordnet werden. So empfinden wir eine Temperatur von 40° C eher als warm, weniger als kalt. So müsste der einen Kategorie ein höherer Wert gegeben werden als der anderen. Diese Art von neuer Logik findet ihre Anwendung da, wo es nicht möglich ist, klare Regeln aufzustellen, und da, wo es Geschwindigkeitsprobleme nicht zulassen, komplizierte Regeln aufzustellen. Diese neuen Schaltungen umgeben uns schon längst im alltäglichen Leben. Ein gutes Beispiel dafür ist das Anti-Verwackelungs-System in modernen Videokameras.
Die Vorzüge ließen diese Methode der Steuerung nützlich erscheinen. So steuert das Navigationssystem das Flugobjekt nach einem Regelwerk, dass in seinen Grundzügen an die Mechanismen der Fuzzy Logic erinnert. Generell arbeitet das Kontrollsystem mit drei Freiheitsgraden: die Neigungen um die X/Y-Achse und die Höhe. Als Eingangsparameter werden hierfür nur für jede Drehachse die Soll-Neigung (SN), die Differenz zwischen Soll- und Ist-Neigung (DN), und die Geschwindigkeit der Neigungsänderung (GN) verwendet. Als letzte Größe fließt noch die Höhe (HO) mit in die Berechnungen ein. Damit reduziert diese Vorgehensweise die physikalischen Eigenschaften auf folgende Variablen: SNx, SNy, DNx, DNy, GNx, GNy und HO.
Um die Umsetzung anfänglich nicht unnötig zu erschweren, wurde ein einfaches Prinzip verwendet. Für die gesamte Steuerung reichen drei Regeln, die einfach und schnell zu berechnen sind und im Zusammenspiel auf die Anfangs genannten Probleme , wie z.B. die Masseabnahme, eingehen. Die erste Regel besagt, dass die Klappenstellung dann verändert wird, wenn DN ungleich Null ist. Die zweite regelt die Größe der Veränderung in Hinsicht auf GN. Ändert sich dabei HO, so erhöht die dritte Regel den Winkel aller Klappen.
Dieses Regelwerk erscheint anfangs nicht geeignet, um den vielen Anforderungen gerecht zu werden. Doch betrachtet man dieses in seiner ganzheitlichen Funktionsweise, so stellt man fest, dass alle eventuell auftretenden Störungen damit ausgeglichen werden können.
Durch den Aufbau des Flugobjektes und seiner Sensoren und Aktoren ergab sich ein Timingproblem bei der Programmierung. So benötigt die Ansteuerung der Servomotoren allein schon 60% der Prozessorleistung. Die Auslastung des Prozessors für die Höhenerfassung richtet sich nach der momentanen Höhe und bewegt sich in einem Rahmen von 10-20% der Gesamtleistung. Weiterhin darf die Ping-Erfassung (siehe Kapitel 5.3.3 ) durch kein äußeres Ereignis gestört werden, da schon ein Fehler von 100 µs eine Wegdifferenz von über 3 cm ausmacht. Diese Gründe führten zu einer Umstrukturierung der Kontrolleinheit. Der momentane Plan zielt darauf ab, dass die Steuerung des Flugobjektes von vier Parallelrechnern übernommen wird.
Der
Masterprozessor ist ein Controller vom Typ 68HC05 der Firma Motorola. Dieser
verfügt über ein eingebranntes Interpreten-Betriebssystem, welches Basic-Token
aus einem externen EEPROM ausführt. Diese Einheit stellt die Verbindung zur
Außenwelt mit dem PC her. Weiterhin werden einige Sensordaten auch hier verarbeitet.
Der Sub-Prozessor ist ein PIC 16C84 von Mikrochip, welcher die Ultraschallpeilung
übernimmt und die Servodaten kontrolliert. Diese Daten werden dann an die zwei
Servo-Prozessoren weitergeleitet, welche dann im Endschritt die zeitaufwendigen
Servosignale generieren. Die genauen Zeitintervalle werden durch ein Interrupt-System
berechnet, welches die Flanken eines programmierten Timers auswertet. Dieser
Aspekt wäre auf dem Sub-Prozessor die Störungsquelle bei der Ping-Erfassung
gewesen. Außerdem werden alle durch die Kontrolleinheit getroffenen Entscheidungen
in einem weiteren externen EEPROM gespeichert, welcher dann als Flugschreiber
bei der Fehleranalyse einen wichtigen Beitrag leistet.
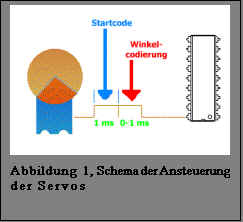 Um sowohl die Vergaser der Motoren als auch die Klappen winkelgenau
einstellen zu können, werden Servomotoren verwendet, die auch schon seit einigen
Jahrzehnten im Modellbereich verwendet werden. Diese haben die Eigenschaft,
dass sie durch ein codiertes digitalenes Signal nur auf einen Winkel eingestellt
werden müssen, welcher dann durch die interne Kontrollelektronik eingehalten
wird. Auch eventuell eintretende Umstellungen werden sofort kompensiert.
Um sowohl die Vergaser der Motoren als auch die Klappen winkelgenau
einstellen zu können, werden Servomotoren verwendet, die auch schon seit einigen
Jahrzehnten im Modellbereich verwendet werden. Diese haben die Eigenschaft,
dass sie durch ein codiertes digitalenes Signal nur auf einen Winkel eingestellt
werden müssen, welcher dann durch die interne Kontrollelektronik eingehalten
wird. Auch eventuell eintretende Umstellungen werden sofort kompensiert.
Das Steuersignal wird mit einer Frequenz von 50Hz für die Servomotoren generiert. Die Startsequenz ist eine positive Flanke von einer ms Dauer. Darauf folgt das Signal für den Winkel. Dieser wird in einer Länge von maximal einer weiteren ms codiert. Hier entspricht die Länge von 0 ms einem Winkel von 0° und ein Signal der Länge 1 ms dem Winkel von 90°.
Die angebrachten Sensoren
liefern die nötigen Daten für die Kontrolleinheit. Darunter erfassen diese die
Neigung, die Höhe und die Rotation um die senkrechte Achse. Dennoch wurden hier
einige Problemsituationen noch nicht berücksichtigt. Weitere Pläne befassen
sich mit der Verarbeitung von Raumkoordinaten, die durch eine Ultraschall-Triangularpeilung
geliefert werden. Denn dieser Freiheitsgrad wurde in den vorherigen Überlegungen
nicht eingebracht. Ein weiteres Problem entsteht durch Seitenwinde, die ohne
Peilung nur mit Beschleunigungssensoren erfasst werden könnten.
Um die Lage im Raum bestimmen zu können, reichen für diese Art der Navigation zwei Freiheitsgrade. Diese beiden Drehachsen laufen durch die Ebene des Dreiecks. Zwei Hybrid-Winkelsensoren nutzen den HALL- Effekt[7] aus, um die Lage relativ zum Erdmagnetfeld zu erfassen. Messverstärker wandeln die schwachen Signale dann in eine von dem Controller messbare Spannung um.
Dieser Sensor dient zur Erfassung
der Eigenrotation um die senkrechte Achse. Eine Anordnung von Magnetfeldsensoren
und Kompensationsspulen wandelt diesen Winkel in eine messbare Spannung um.
Ein gravierendes Problem ergab sich bei dem Interruptkonzept für die Ansteuerung der Servos und bei der Kommunikation zwischen den Prozessoren. Es ist nicht möglich, den Takt für die Übertragung vom Master vorgeben zu lassen, da beim Servoprozessor ein eintretender Interrupt es unmöglich macht, die Daten korrekt zu empfangen. Deswegen bestand die Notwendigkeit, ein neues Protokoll zu entwickeln, welches die Aspekte der Interruptunterbrechung und der unterschiedlichen Taktfrequenzen berücksichtigt. Es war also nötig, dass das Taktsignal von beiden Kommunikationspartnern generiert wird und dass sowohl das Senden als auch der Empfang eines Datenpakets bestätigt wird. Dies führte zur Entwicklung des "request and serve-Protokolls", kurz RSP. Dabei wird im ersten Schritt die Request-Leitung vom Sender zum Anmelden der Sendebereitschaft der Pegel auf logisch HIGH gezogen. Der Empfänger bestätigt seine Aktivität ebenfalls durch eine 0-1-Flanke. Zur Synchronisation werden in den Schritten 3 und 4 beide Partner das Ende eines Protokollabschnittes noch jeweils ihre Leitung nacheinander wieder auf LOW ziehen. Nun kann bei jedem Kommunikationsabschnitt entweder synchronisiert werden, ein Steuerbit oder auch ein Datenbit übertragen werden. Dafür legt der Sender den entsprechenden Wert vor jedem Datenpaket auf die Daten-Leitung.
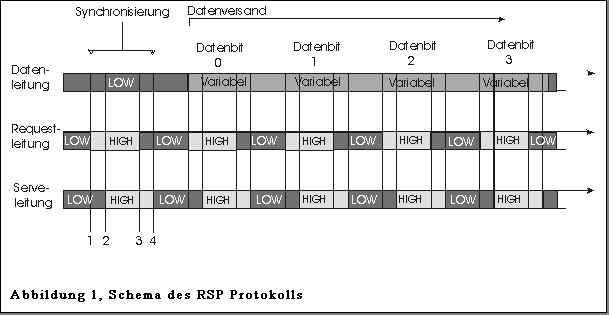 Dieses Protokoll
ist eine Abwandlung des seriellen I2C-Bus, der entwickelt wurde, um mehrere
Chips über wenig Leitungen innerhalb eines Gerätes, z.B. in einem Fernsehgerät,
zu verbinden. Dies war aber nicht geeignet, da hier nur der Master den Takt
generiert und mehrere Chips über diesen Bus gleichzeitig angesprochen werden
können, was in diesem Fall nicht notwendig war.
Dieses Protokoll
ist eine Abwandlung des seriellen I2C-Bus, der entwickelt wurde, um mehrere
Chips über wenig Leitungen innerhalb eines Gerätes, z.B. in einem Fernsehgerät,
zu verbinden. Dies war aber nicht geeignet, da hier nur der Master den Takt
generiert und mehrere Chips über diesen Bus gleichzeitig angesprochen werden
können, was in diesem Fall nicht notwendig war.
Für den Fall, dass die Steuerelektronik ausfallen oder eine kritische Notsituation nicht erkennen sollte, ist eine Vorrichtung nötig, die einerseits die volle Kontrolle über alle Kanäle wieder an den Benutzer übergibt, und zudem alle Aktoren in einen Sicherheitszustand bringt, was bei einer manuellen Steuerung nicht sofort möglich wäre. Angewandt bedeutet dies für das Flugobjekt, dass im Falle eines Rechnerausfalls der Benutzer manuell nicht schnell genug reagieren kann.
Die momentane Schaltung sperrt alle Kanäle, sobald das Signal der Steuereinheit für eine Zeitspanne > 40 ms ausfällt, und fährt alle Servomotoren in eine eingestellte Position. Dieser Sicherheitszustand ist so gewählt, dass die Motorleistung gedrosselt wird, und das Flugobjekt rasch zu Boden sinkt. Der dabei entstehende Schaden ist jedoch um einiges geringer als ein solcher, der durch einen Überschlag oder eine Kollision der Rotoren mit Objekten entstehen würde.
Es kann in der Erprobungsphase nicht sichergestellt werden, dass alle Systeme einwandfrei arbeiten. Um Unfälle und Materialschäden zu vermeiden ist das uFO mit drei Sicherheitsleinen am Boden befestigt worden. Die Länge war so gewählt, dass es ca. 60cm abheben konnte. Durch diese Einschränkung konnte das Flugverhalten aber nicht ausreichend beobachtet werden. Aus diesen Grund ist der Flug-Test-Ausleger gebaut worden (siehe Abb. 14). Das uFO (grau) kann in sich in der Höhe frei bewegen sowie in alle Richtungen kippen. Durch das Gegengewicht ist der Ausleger so ausgewogen, dass nur eine kleine Kraft notwendig ist um das Gestell anzuheben. Dadurch wird sichergestellt, dass die Motoren nicht mehr Arbeit leisten als eigentlich notwendig wäre.
In
der Anlage liegt eine CD-Rom mit gefilmten Testflügen bei.
hendeckend
Umweltdaten sammeln.
Der uFO ist wie auch ein
normaler Hubschrauber universell einsetzbar. Es kann beliebig vergrößert werden
und könnte ab einer bestimmten Größe auch Personen befördern. Der in dieser
Arbeit präsentierte uFO ist zunächst nur für Grundlagenforschung in unserem
Team vorgesehen. Da er im Gegensatz zu dem Vorgängermodell V1 ausreichend motorisiert
ist und eine Flugzeit von >5min
besitzt, ist es nur eine Übungssache des Piloten bis der uFO manuell einwandfrei
geflogen werden kann.

[1] Microsoft® Encarta® 99 Enzyklopädie. © 1993-1998 Microsoft Corporation
[2] Lindner u.a.: Taschenbuch der Elektrotechnik und Elektronik. Fachbuchverlag Leipzig 1998
[3] Harrach Prof. Dietrich, EXPERIMENTALPHYSIK II Elektrizität und Optik, Universität Mainz, 14. Vorlesung am 10.6.98
[1] Blimp, ähnlich einem Zeppelin, nur unstarr, ohne festes Innengestell. Die Form wird allein durch den Gasdruck gegeben.
[2] Ein Flügel oder auch eine Tragfläche ist so konstruiert, dass die Luft schneller über seine Oberseite strömt als über seine Unterseite. Dadurch entsteht auf der Oberseite ein geringerer Druck als an der Unterseite. Der so entstehende Druckunterschied führt zum Auftrieb. [1]
[3] Diffusion (Physik), das Fließen von Energie oder Materie von einem Ort höherer Konzentration zu einem Ort niedrigerer Konzentration
[4] GFK, Glasfaserverstärkter Kunststoff
[5] Zusatzmodul der Fernbedienung für eine Kanalerweiterung
[6] "Neumann, John von (1903-1957), amerikanischer Mathematiker ungarischer Herkunft" [1]
[7] "Auf die Ladungsträger eines im Magnetfeld befindlichen Leiters wirkt die Kraft senkrecht zum Feld und zur Driftgeschwindigkeit. Die Ablenkung oder auch die magnetische Drift senkrecht zu der Leiteroberfläche führt zu Ausbildung von Oberflächenladungen, die ein elektrisches Gegenfeld aufbauen."[3]